ROS机器人虚拟仿真挑战赛本地电脑环境配置测试-程序员宅基地
技术标签: 机器人
预备基础
此案例需要完成:
ROS机器人虚拟仿真挑战赛本地电脑环境配置记录-程序员宅基地
ROS机器人虚拟仿真挑战赛本地电脑环境配置个人问题汇总-程序员宅基地
命令测试
在不同的终端窗口分别输入:
标签1:
roslaunch tianracer_gazebo demo_tianracer_teb_nav.launch标签2:
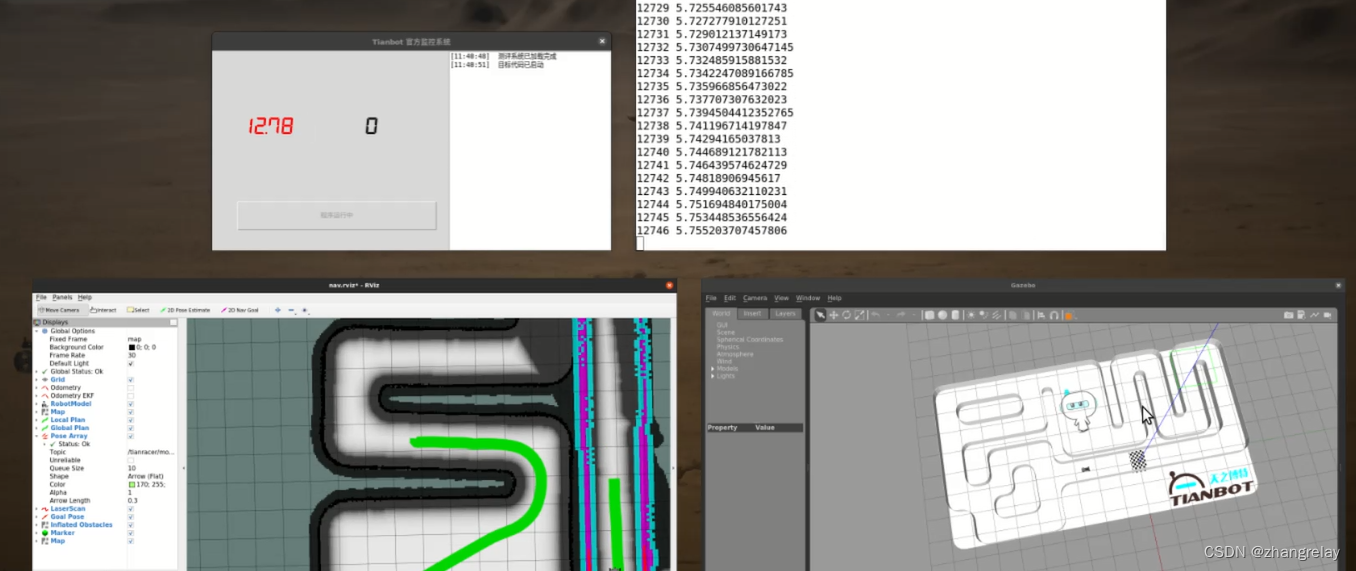
rosrun tianracer_gazebo judge_system_node.py如果小车没有移动:


rviz中没有路径规划。
需要查找相应文件修改路径的位置。
能动起来的rviz和gazebo如下所示:


路径点相关:
阿克曼模型也可以采用类似模式设计控制器。
录屏:
ROS机器人虚拟仿真挑战赛本地电脑环境配置测试
轨迹路径问题
本校《移动机器人设计与实践》和《ROS机器人程序设计》均采用课+赛+证结合模式。
参考:
在f1tenth仿真中如何实现更快速的跑圈-曲线分析篇-程序员宅基地
证书
完全自愿参与,无任何强制。
详细总结如下:
一、预备基础
在进行ROS机器人虚拟仿真挑战赛前,需要完成本地电脑的环境配置。这通常包括安装ROS系统、配置ROS环境变量、安装必要的ROS包以及设置工作空间等。参考“ROS机器人虚拟仿真挑战赛本地电脑环境配置记录”和“个人问题汇总”两篇博客,可以帮助我们避免一些常见的配置错误,并提前解决可能出现的问题。
二、命令测试
在配置好环境后,我们需要在不同的终端窗口输入命令来测试ROS系统的运行情况。
- 标签1命令:
roslaunch tianracer_gazebo demo_tianracer_teb_nav.launch
这个命令用于启动Tianracer在Gazebo中的仿真,并使用TEB局部规划器进行导航。如果小车没有移动,那么我们需要检查Gazebo和RViz的界面,以及ROS的日志输出,看是否有错误信息。 - 标签2命令:
rosrun tianracer_gazebo judge_system_node.py
这个命令用于运行Tianracer的评分系统节点。如果小车没有移动,评分系统可能无法正常工作。
三、路径规划问题
如果在RViz中没有看到路径规划,那么可能是因为路径规划器没有正确配置或者没有接收到正确的传感器数据。我们需要检查路径规划相关的配置文件,确保路径规划器的参数设置正确,并且传感器数据能够正确传递给路径规划器。
四、轨迹路径问题
差动驱动机器人的轨迹设计是机器人导航的关键部分。阿克曼模型是一种常用的轨迹设计模型,适用于差动驱动机器人。我们可以参考相关博客和教程,学习如何使用阿克曼模型设计机器人的轨迹,并在仿真环境中进行测试。
五、课程与证书
《移动机器人设计与实践》和《ROS机器人程序设计》这两门课程采用课+赛+证结合模式,旨在通过实践和学习,提升学生的机器人设计和编程能力。参加ROS机器人虚拟仿真挑战赛并获得证书,是对自己学习成果的一种肯定,也是对未来求职或深造的有力支持。虽然证书是完全自愿参与的,但获得证书可以作为一种能力的证明,提升自己在相关领域的竞争力。
总的来说,ROS机器人虚拟仿真挑战赛不仅是一个学习和实践的平台,也是一个挑战自我、提升能力的机会。通过参与比赛,我们可以深入了解ROS系统的运作机制,掌握机器人设计和编程的技巧,为未来的职业发展打下坚实的基础。
进一步扩展“ROS机器人虚拟仿真挑战赛”的详细总结如下:
一、预备基础
在进行ROS机器人虚拟仿真挑战赛前,完成本地电脑的环境配置是不可或缺的第一步。这涉及到对ROS系统的深入理解和一系列复杂的配置步骤。
首先,需要确保已经安装了与挑战赛要求相匹配的ROS发行版。不同的发行版在功能和API上可能有所差异,因此选择正确的发行版至关重要。安装完成后,还需要配置ROS的环境变量,以确保系统能够正确识别ROS的相关路径和命令。
接下来,需要安装必要的ROS包。这些包可能包括用于机器人仿真的Gazebo、用于可视化的RViz、用于路径规划的TEB局部规划器等。安装这些包时,需要注意包的版本和依赖关系,以确保它们能够正常工作。
最后,需要设置ROS的工作空间。工作空间是ROS中用于组织代码和资源的重要概念,它包括了源代码、构建结果和安装目录等。正确设置工作空间可以方便我们对代码进行管理和维护。
在配置过程中,可能会遇到一些个人问题。参考相关的博客和教程,可以帮助我们快速定位并解决问题。同时,也可以加入ROS的社区和论坛,与其他ROS开发者交流经验和技巧。
二、命令测试
完成环境配置后,我们需要通过命令测试来验证ROS系统的运行情况。
首先,通过roslaunch命令启动Tianracer在Gazebo中的仿真。这个命令会加载Tianracer的仿真配置文件,并在Gazebo中创建一个虚拟的机器人环境。如果小车没有移动,我们需要检查Gazebo界面中的机器人模型是否加载成功,以及是否有任何错误或警告信息。
然后,通过rosrun命令运行Tianracer的评分系统节点。这个节点会接收来自仿真环境的数据,并根据一定的规则对机器人的表现进行评分。如果评分系统没有正常工作,我们需要检查节点的日志输出,看是否有任何异常或错误信息。
在测试过程中,我们还可以使用RViz来可视化机器人的状态和轨迹。通过RViz,我们可以直观地看到机器人的位置、朝向以及规划出的路径等信息。如果RViz中没有显示路径规划,我们需要检查路径规划器的配置和传感器数据的传递是否正确。
三、路径规划问题
路径规划是机器人导航的关键部分,它涉及到从起点到终点的最优路径选择。在ROS中,有多种路径规划器可供选择,如全局路径规划器和局部路径规划器等。
对于Tianracer的仿真环境,我们使用了TEB局部规划器进行导航。TEB规划器是一种基于时间弹性的局部路径规划器,它能够在考虑机器人动力学约束的同时优化路径的平滑性和时间效率。然而,如果RViz中没有显示路径规划,那么可能是TEB规划器的配置参数不正确或者传感器数据没有正确传递给规划器。
为了解决这个问题,我们需要检查TEB规划器的配置文件,确保其中的参数设置符合Tianracer机器人的特性和要求。特别是与机器人动力学约束、障碍物避障以及路径平滑性相关的参数,需要进行仔细的调整和测试。
此外,我们还需要确保传感器数据能够正确传递给TEB规划器。这涉及到传感器数据的采集、处理和发布等步骤。我们需要检查传感器的驱动程序和ROS节点是否正常工作,以及传感器数据是否与规划器所需的格式和频率相匹配。
四、轨迹路径问题
差动驱动机器人的轨迹设计是实现自主导航的关键环节。阿克曼模型是一种常用的轨迹设计模型,它适用于差动驱动机器人的运动特性。
在阿克曼模型中,机器人的运动被描述为一系列圆弧和直线的组合。通过合理设计这些圆弧和直线的参数,我们可以实现机器人的平滑运动和精确定位。在ROS中,我们可以使用阿克曼模型来设计机器人的轨迹,并通过控制机器人的线速度和角速度来实现轨迹的跟踪。
然而,轨迹设计并不是一件简单的事情。它需要考虑机器人的动力学约束、环境障碍物以及任务要求等多个因素。为了获得更好的轨迹效果,我们可以使用优化算法对轨迹进行优化,以找到最优的路径和速度组合。
此外,我们还可以通过仿真环境对轨迹进行测试和验证。在Tianracer的仿真环境中,我们可以使用Gazebo和RViz来观察机器人的运动轨迹和状态,并根据测试结果对轨迹进行调整和优化。
五、课程与证书
参与《移动机器人设计与实践》和《ROS机器人程序设计》这两门课程,不仅可以帮助我们深入学习ROS系统和机器人技术,还可以提升我们的实践能力和解决问题的能力。通过课程中的理论学习和实践操作,我们可以掌握ROS的基本概念和工具,了解机器人的感知、决策和控制等方面的知识。
同时,参加ROS机器人虚拟仿真挑战赛并获得证书,是对我们学习成果的一种肯定和认可。证书可以作为我们求职或深造的加分项,提升我们在机器人领域的竞争力。虽然证书是自愿参与的,但获得证书可以激励我们更加努力地学习和实践,提升自己的技能水平。
总之,ROS机器人虚拟仿真挑战赛是一个充满挑战和机遇的平台。通过参与比赛和学习相关
课程,我们可以深入了解ROS系统的运作机制,掌握机器人设计和编程的技巧,为未来的职业发展打下坚实的基础。
六、竞赛经验与学习心得
参与ROS机器人虚拟仿真挑战赛,不仅仅是一个技术层面的挑战,更是一个全方位的学习与成长过程。
在竞赛过程中,我们可能会遇到各种各样的问题和挑战,比如机器人的路径规划失败、传感器数据异常、控制算法不稳定等。这些问题往往需要我们综合运用所学的ROS知识、机器人技术以及编程技能来分析和解决。在解决问题的过程中,我们会不断地尝试、调试和优化,从而逐渐掌握解决问题的方法和技巧。
此外,参与挑战赛还需要我们具备团队合作和沟通的能力。在团队中,每个人都有自己的专长和角色,我们需要相互协作、互相支持,共同完成任务。通过团队合作,我们可以学习到不同人的思维方式和解决问题的方法,提升自己的综合素质。
除了技术和团队方面的收获,参与挑战赛还能让我们更加深入地了解机器人领域的前沿技术和应用。通过与来自不同学校和行业的选手交流,我们可以了解到各种新的想法和解决方案,从而拓宽自己的视野和思路。
总的来说,参与ROS机器人虚拟仿真挑战赛是一次难得的学习和成长机会。通过挑战和锻炼,我们可以不断提升自己的技能水平和综合素质,为未来的职业发展做好充分的准备。
七、未来展望
随着机器人技术的不断发展和普及,ROS作为机器人领域的开源框架,其重要性和影响力也在不断提升。未来,ROS将在更多领域得到应用,包括工业自动化、智能家居、医疗服务等。
对于个人而言,掌握ROS技能和机器人技术将是我们未来职业发展的重要方向之一。通过不断学习和实践,我们可以将ROS应用于实际项目中,为企业和社会创造价值。同时,我们也可以利用ROS平台开展创新研究和探索,为机器人领域的发展做出贡献。
总之,ROS机器人虚拟仿真挑战赛只是我们学习和探索机器人技术的一个起点。未来,我们将继续深入学习和实践,不断提升自己的技能水平和综合素质,为机器人领域的发展贡献自己的力量。
智能推荐
【无标题】App iOS端适配iOS 15系统_lsapplicationqueriesschemes 超过 50 怎么办-程序员宅基地
文章浏览阅读2.6k次。各位好:App iOS端适配iOS 15系统,适配后将使用新的xcode 13打包提交App Store。一、适配内容:1、新增了iPhone 13 mini机型(尺寸同iPhone12 mini),5.4 英寸 (对角线) OLED 全面屏,屏幕分辨率为2340 x 1080 像素。如果是通过分辨率来判断则需要增加一个模式。 #define iPhone13mini ([UIScreen instancesRespondToSelector:@selector(currentMo_lsapplicationqueriesschemes 超过 50 怎么办
抓包工具Fiddler的下载安装使用_fiddler抓包下载-程序员宅基地
文章浏览阅读497次。右侧显示就是我们主机发送http/https请求的记录。如果我们要查看某一次访问,可以双击该记录,在右侧就会显示这次http请求的内容以及返回的响应的内容。右键全选,点击remove,选择selected sessions,就能删除选择的sessions。安装过程只用一路next即可;_fiddler抓包下载
html语言ppt,htmlppt课件-程序员宅基地
文章浏览阅读642次。PPT内容这是htmlppt课件,关于第2章Web编程技术,包括了HTML的发展历史,HTML的基本框架,HTML的各种常用标记:文字标记、图片标记、超级链接标记,CSS的基本使用方法,如何让CSS与HTML协同工作,JavaScript中的变量、数组、表达式、运算符、流程控制语句,JavaScript的函数、内置对象、浏览器对象的层次和DOM模型的建立和使用等内容,欢迎点击下载。第2章 Web编..._html if elseppt课件
solr html显示,Solr查询界面-程序员宅基地
文章浏览阅读259次。您可以使用查询界面将搜索查询提交给 Solr 集合并分析结果。在下面截图中的例子中,查询已经被提交,并且界面显示了作为 JSON 形式发送到浏览器的查询结果。在这个例子中,genre:Fantasy 的查询被发送到 “films” 集合。表单中的所有其他选项都使用了默认值,下表中对此进行了简要介绍,本指南的后面部分将对此进行详细介绍。该响应显示在窗体的右侧。对 Solr 的请求只是简单的 HTTP..._solr查询界面
【Java EE】Spring请求如何传递参数详解-程序员宅基地
文章浏览阅读1.5k次,点赞65次,收藏51次。Spring请求如何传递参数详解,传递单个参数,传递多个参数,传递对象,后端参数重命名(后端参数映射),传递数组,传递集合,传递JSON数据,获取URL中参数@PathVariable,上传文件@RequestPart,获取Cooki/Session,获取Header
串口通讯参考文章
Android 串口开发,发送串口命令,读卡,反扫码,USB通讯,实现demo。——持续更新_androidschedulers.from(mwritethread.getlooper());-CSDN博客
随便推点
Mendix Excel导出介绍_mendix实现excel导出-程序员宅基地
文章浏览阅读320次。本文介绍了Excel导出的两种方式及成果展示_mendix实现excel导出
5 gtm 工作原理_基于GTM法的水泥稳定碎石力学性能研究-程序员宅基地
文章浏览阅读226次。文章来源:微信公众号”沥青路面“引 言众所周知,以水泥稳定碎石为代表的半刚性材料是中国目前使用最为广泛的基层材料,因为其力学性能优良、使用成本较低、原材料来源广泛和施工工艺简单等优点,水泥稳定碎石在未来十几年内仍将是中国使用最为广泛的基层材料。目前水泥稳定碎石在设计和施工方面存在一些问题,例如室内成型方式与实际道路受力状态存在一定差异;设计指标和施工检测指标相关性不足;对矿质石料级配的要求没有体现..._无侧限抗压强度与劈裂强度的的关系
黑科技,Python 脚本帮你找出微信上删除你好友的人_微信出现brandsessionholder-程序员宅基地
文章浏览阅读1.5k次。编者按:本文来自稀土掘金江昪编译自 Github:0x5e/wechat-deleted-friends “ 清理下[微笑],不用回。你的朋友圈没事也该清清了,打开设置,通用,功能,群助手,全选,把我的信息粘贴一下,就可以了,发送就知道谁把你删了,方便你清人,不清不知道 ,一清吓一跳。” 相信大家在微信上一定被上面的这段话刷过屏,群发消息应该算是微信上流传最广的找到删除好友的方法..._微信出现brandsessionholder
MySQL存储过程 游标循环的使用_存储过程 重复定义同名游标 会覆盖吗?-程序员宅基地
文章浏览阅读1.5k次。MySQL存储过程 游标循环的使用_存储过程 重复定义同名游标 会覆盖吗?
浙江大学计算机科学导论试题,2003年度浙江大学计算机科学导论试卷.doc-程序员宅基地
文章浏览阅读372次。浙江大学2003-2004学年第一学期期末考试<>课程试卷A姓名: 专业: 学号:单选题(每小题1分,共20分)1.若计算机内存中有若干个内存单元,它们的地址编号从00H到FFH,则这些内存单元总共可存放的数据数量为:( B )A.256 bitB.256 ByteC.255 KBD.255 Kb2. 计算机网络的最基本功能就是在网络中的计算机之..._浙江大学计算机科学导论连线题
汽车信息安全入门总结(1)
汽车信息安全从2015年开始被引起重视发展至今已近10年时间,虽然有很多高屋建瓴的白皮书、指导标准可以指导我们从宏观了解汽车信息安全这个新兴行业,但真正实际需求落实到我们一线开发人员身上,总归感觉缺少点最底层的逻辑闭环。与汽车传统的主被动功能安全相比,汽车信息安全问题一旦出现可能会带来巨大影响,不仅对驾驶员、乘客的人身安全、隐私安全和财产安全造成影响,还会给车企或者供应商带来巨大经济损失,更有甚者影响国家安全(参考Tesla)。任何事物的出现都背景和根源,汽车信息安全也不例外。今天就来聊聊个人粗浅的看法。