UART的学习记录_uart block-程序员宅基地
技术标签: 开发板学习
文章目录
其实学这章的时候到我学完了,感觉还是没什么章法的样子,摸不着一条清晰的脉络。
所以一步步从头开始自己整理回顾吧。
开发板的UART的block diagram

从上图可以提取到比较关键的信息是:
1.从peripheral bus外部总线连接的
2.Control Unit 应该有相关配置的寄存器
3.Buad rate generator 跟时钟源有关
4.transmitter里面有buffer register和shifter
5.receiver里面包括buffer register和shifter
6.别漏了最终的TXD和RXD
DATA TRANSMITTION

能获取的信息
数据帧是可被设计的包括:
1.一个起始位
2.五到8位数据位
3.可选的奇偶校验位
4.一到两位停止位
5.这些都是被ULCONn寄存器所制定的
DATA RECEPTION
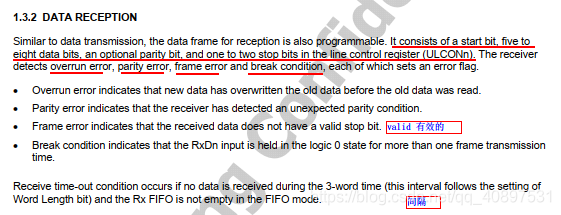
数据接收跟数据传输类似,最后讲了接收器会侦测各种错误并且标出一个flag出来让你辨识。
RS-232
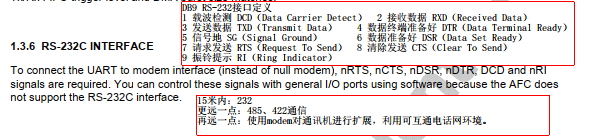
红色框框是自己网上查再补充的。
各种工作模式
紧接着讲到了
AFC模式
引用课程笔记
1.7.4.2、自动流控(AFC:Auto flow control)
(1)为什么需要流控?流控的目的是让串口通信非常可靠,在发送方速率比接收方快的时候流控可以保证发送和接收不会漏掉东西。
(2)现在为什么不用流控?现在计算机之间有更好更高级(usb、internet)的通讯方式,串口已经基本被废弃了。现在串口的用途更多是SoC用来输出调试信息的。由于调试信息不是关键性信息、而且由于硬件发展串口本身速度已经相对慢的要死了,所以硬件都能协调发送和接收速率,因此流控已经失去意义了,所以现在基本都废弃了。
然后是
DMA模式
1.7.5.2、DMA模式及其作用
(1)DMA direct memory access,直接内存访问。DMA本来是DSP中的一种技术,DMA技术的核心就是在交换数据时不需要CPU参与,模块可以自己完成。
(2)DMA模式要解决的问题和上面FIFO模式是同一个问题,就是串口发送/接收要频繁的折腾CPU造成CPU反复切换上下文导致系统效率低下。
(3)传统的串口工作方式(无FIFO无DMA)效率是最低的,适合低端单片机;高端单片机上CPU事物繁忙所以都需要串口能够自己完成大量数据发送/接收。这时候就需要FIFO或者DMA模式。FIFO模式是一种轻量级的解决方案,DMA模式适合大量数据迸发式的发送/接收时。
FIFO模式
1.7.5.1、FIFO模式及其作用
(1)典型的串口设计,发送/接收缓冲区只有1字节,每次发送/接收只能处理1帧数据。这样在单片机中没什么问题,但是到复杂SoC中(一般有操作系统的)就会有问题,会导致效率低下,因为CPU需要不断切换上下文。
(2)解决方案就是想办法扩展串口控制器的发送/接收缓冲区,譬如将发送/接收缓冲器设置为64字节,CPU一次过来直接给发送缓冲区64字节的待发送数据,然后transmitter慢慢发,发完再找CPU再要64字节。但是串口控制器本来的发送/接收缓冲区是固定的1字节长度的,所以做了个变相的扩展,就是FIFO。
(3)FIFO就是first in first out,先进先出。fifo其实是一种数据结构,这里这个大的缓冲区叫FIFO是因为这个缓冲区的工作方式类似于FIFO这种数据结构。
IrDA模式
1.7.5.3、IrDA模式及其用法 (1)IrDA其实就是红外,红外就是红外线通信(电视机、空调遥控器就是红外通信的)。 (2)红外通信的原理是发送方固定间隔时间向接收方发送红外信号(表示1或0)或者不发送红外信号(表示0或者1),接收方每隔固定时间去判断有无红外线信号来接收1和0.
(3)分析可知,红外通信和串口通信非常像,都是每隔固定时间发送1或者0(判断1或0的物理方式不同)给接收方来通信。因此210就利用串口通信来实现了红外发送和接收。
(4)210的某个串口支持IrDA模式,开启红外模式后,我们只需要向串口写数据,这些数据就会以红外光的方式向外发射出去(当然是需要一些外部硬件支持的),然后接收方接收这些红外数据即可解码得到我们的发送信息。
时钟的设置
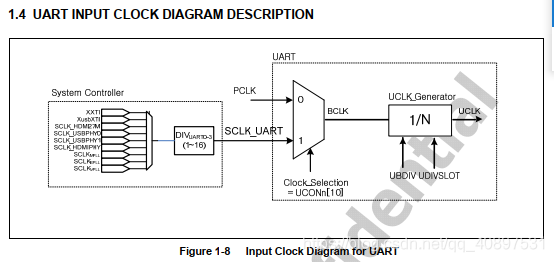
从图中可以看到:
1.UART的时钟源可以从PCLK或者SCLK_UART中选择;
2,是用UCONn寄存器去选择的
3.最终通过UCLK_Generator产生UART需要的时钟,相关的寄存器UBDIV、UDIVSLOT
I/O DESCRIPTION
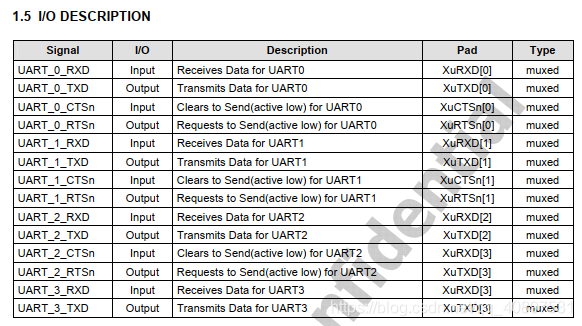
课程讲用串口0,只需要关心前四项即可
在Pad项中可以看到XuRXD等这样的字眼,再从底板图里面查找就知道对应的GPIO是哪个了。
REGISTER MAP
太长不贴了, 数据手册864页。
1.开头提及到的ULCON0 跟数据帧有关,要设置
2.UCON0 跟时钟选择有关
3.UFCON0 选不选FIFO模式
4.UMCON0 选不选Modem控制
5.UTRSTAT0 发送接收状态位的
6.UFSTAT0 看FIFO状态的
7.UMSTAT0 看Modem状态的
8.UTXH0 跟Transmit Buffer有关
9.URXH0 跟Receive Buffer有关
10.UBRDIV0 跟波特率有关
11.UDIVSLOT0 跟波特率有关
12.INTP0 跟中断挂起有关
13.INTSP0 跟中断源挂起有关
14.INTM0 跟中断掩码有关
课程里面为了简单没用FIFO Moderm 中断,所以很多寄存器都不用设置。
目前需要的有
ULCON0 跟数据帧有关,要设置
UCON0 跟时钟选择有关
UFCON0 选不选FIFO模式
UTRSTAT0 发送接收状态位的
UTXH0 跟Transmit Buffer有关
URXH0 跟Receive Buffer有关
UBRDIV0 跟波特率有关
UDIVSLOT0 跟波特率有关
最后别忘了两个GPIO TXD和RXD的。
开始写程序
初始化几个寄存器
ULCON
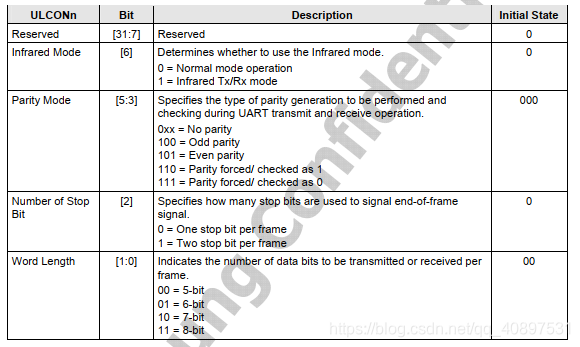
设置一帧8位,一帧两个停止位,零奇偶校验、普通模式
ULCON0 = 0x07
UCON
太长不贴图了 869页 [3:2]和[1:0]分别设置01,发送接收都是01
UCON0 = 0x03;
UFCON0
全部置零,不用FIFO模式
UMCON0
也置零,不用。
波特率设置
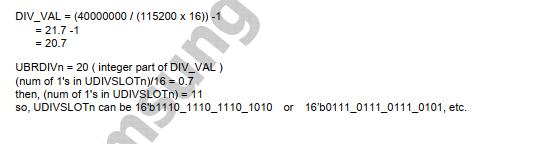
他这里的波特率设置是要计算一下的
通过看数据手册878-880,最终设置
UBRDIV0 = 34;
UDIVSLOT0 = 0xdfdd;
其实还有其他设置的值,我选的PCLK 是66 MHz的
发送以及接收
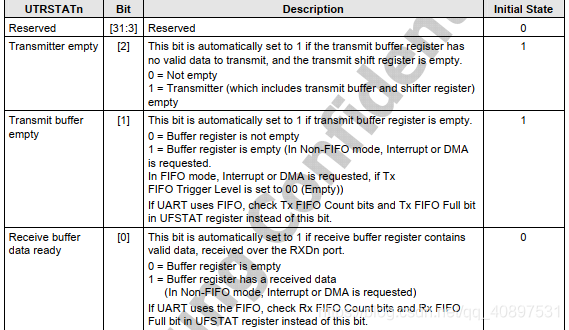
void uart_putc(char c)
{
while (!(rUTRSTAT0 & (1<<1)));
rUTXH0 = c;
}
char uart_getc(void)
{
while (!(rUTRSTAT0 & (1<<0)));
return (rURXH0 & 0xff);
}
1.判定状态位的条件对照数据手册多调转几次就能看明白了
2.原课程是直接在main函数里面调用uart_putc函数发送字符,在secureCRT里面查看。然后它getc函数里面URXH0是跟0x0f进行与运算,只取了低八位。
我这里与0xFF进行与运算取了16位。
为什么取16位呢?
我的设想是在串口调试助手里面设置,自己发什么自己收什么,刚开始设置的时候呢跟着课程的0x0f进行设置,所以收的时候老是丢了高8位,很是苦恼,后面自己在写这篇日志的时候认真看才发现了问题所在。
啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊啊!!!!!!!!!!!
发泄完了。
main函数
void main(void)
{
uart_init();
char c ;
while(1)
{
c = uart_getc();
uart_putc(c);
}
}
简单调用一下
实测
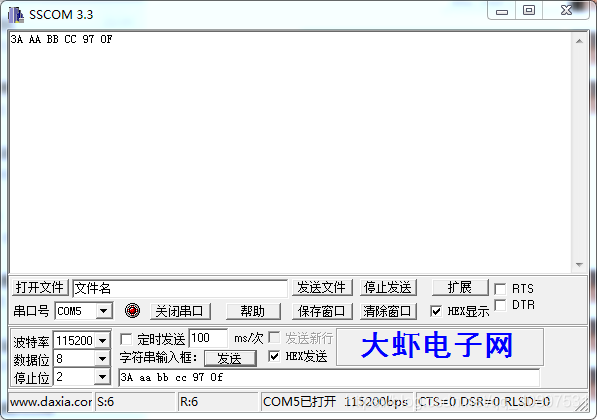
想法终于实现了。good。。。
移植别人的printf实现在securecrt里面显示打印信息
其实这部分的话就真的是跟着课程做了,自己做应该做不来的。
改动得最多是Makefile的部分
Makefile
在原文件夹里面添加了课程给的代码 包括有两个文件夹 include和lib
下面的Makefile就写得比较正式了,而且我都写了相应的注释,希望对自己以后有帮助
#编译
CC = arm-linux-gcc
#链接
LD = arm-linux-ld
#生成bin文件
OBJCOPY = arm-linux-objcopy
#反编译用的
OBJDUMP = arm-linux-objdump
#生成库文件
AR = arm-linux-ar
#shell pwd 表示当前的目录 shell命令+pwd 类似linux下pwd
INCDIR := $(shell pwd)
# C预处理器的flag,flag就是编译器可选的选项 不用stdlib 不用std includeI
# -I Include Directory /当前目录里面的 include
CPPFLAGS := -nostdlib -nostdinc -I$(INCDIR)/include
# C编译器的flag -W all 所有waring都开 -O2 编译器的默认优化选项
# -f no bulit in 不用标准库 不用头
CFLAGS := -Wall -O2 -fno-builtin
#导出这些变量到全局变量,给子文件夹使用
export CC LD OBJCOPY OBJDUMP AR CPPFLAGS CFLAGS
objs := start.o led.o clock.o uart.o main.o
#把当前makefile与子Makefile关联起来
objs +=lib/libc.a
uart.bin: $(objs)
$(LD) -Tlink.lds -o uart.elf $^
$(OBJCOPY) -O binary uart.elf uart.bin
$(OBJDUMP) -D uart.elf > uart_elf.dis
gcc mkv210_image.c -o mkx210
./mkx210 uart.bin 210.bin
# 进去子目录里面make完之后再退出来
lib/libc.a:
# 要写在一行里面 不能分成三行写 ,一行里面用;隔开
cd lib; make; cd ..
%.o : %.S
$(CC) $(CPPFLAGS) $(CFLAGS) -o $@ $< -c
%.o : %.c
$(CC) $(CPPFLAGS) $(CFLAGS) -o $@ $< -c
clean:
rm *.o *.elf *.bin *.dis mkx210 -f
cd lib; make clean; cd ..
修改之前的uart.c
首先是putc和getc函数的名字进行修改,之前是uart_putc( )
和uart_getc( )
这两个函数都要修改成与移植的printf函数里面的getc和putc一致
另外
为了使得输出的时候比较好看,outc( )变成了这样
void putc(char c)
{
//这一截是为了如果输出的最后发现最后是换行\n的话
//就执行回车\r,这样输出会对齐
if (c == '\n')
{
while (!(rUTRSTAT0 & (1<<1)));
rUTXH0 = '\r';
}
//这里是普通输出的时候就输出字符
while (!(rUTRSTAT0 & (1<<1)));
rUTXH0 = c;
}
main.c
#include "stdio.h"
//这里就要用别人的标准库了,不然就用不了printf
void uart_init(void); //uart_init其实在uart.c里面,只不过这里先声明一下,免得报警
void delay2(void);
int main(void)
{
uart_init();
//下面这段是之前自己收发用的
/* char c ;
while(1)
{
c = getc();
putc(c);
} */
int a = 21;
printf("count down from 20\n\n");
while(a)
{
a = a--;
printf("test for printf %d\n",a);
//printf("\r");
delay2();
}
printf("\nthe end !\n");
return 0;
}
void delay2(void)
{
volatile unsigned int i = 2400000; // volatile 让编译器不要优化,这样才能真正的减
while (i--); // 才能消耗时间,实现delay
}
总结
从原理图抓取关键信息,根据需要进行修改。
其实我问了我一个在工作的同事,他说配置这些串口,芯片通信,厂家会有一些demo给你,你看懂了自己进行修改即可。
智能推荐
如何配置DNS服务的正反向解析_dns反向解析-程序员宅基地
文章浏览阅读3k次,点赞3次,收藏13次。root@server ~]# vim /etc/named.rfc1912.zones #添加如下内容,也可直接更改模板。[root@server ~]# vim /etc/named.conf #打开主配置文件,将如下两处地方修改为。注意:ip地址必须反向书写,这里文件名需要和反向解析数据文件名相同。新建或者拷贝一份进行修改。nslookup命令。_dns反向解析
设置PWM占空比中TIM_SetCompare1,TIM_SetCompare2,TIM_SetCompare3,TIM_SetCompare4分别对应引脚和ADC通道对应引脚-程序员宅基地
文章浏览阅读2.5w次,点赞16次,收藏103次。这个函数TIM_SetCompare1,这个函数有四个,分别是TIM_SetCompare1,TIM_SetCompare2,TIM_SetCompare3,TIM_SetCompare4。位于CH1那一行的GPIO口使用TIM_SetCompare1这个函数,位于CH2那一行的GPIO口使用TIM_SetCompare2这个函数。使用stm32f103的除了tim6和tim7没有PWM..._tim_setcompare1
多线程_进程和线程,并发与并行,线程优先级,守护线程,实现线程的四种方式,线程周期;线程同步,线程中的锁,Lock类,死锁,生产者和消费者案例-程序员宅基地
文章浏览阅读950次,点赞33次,收藏19次。多线程_进程和线程,并发与并行,线程优先级,守护线程,实现线程的四种方式,线程周期;线程同步,线程中的锁,Lock类,死锁,生产者和消费者案例
在 Linux 系统的用户目录下安装 ifort 和 MKL 库并配置_在linux系统的用户目录下安装ifort和mkl库并配置-程序员宅基地
文章浏览阅读2.9k次。ifort 编译器的安装ifort 编译器可以在 intel 官网上下载。打开https://software.intel.com/content/www/us/en/develop/tools/oneapi/components/fortran-compiler.html#gs.7iqrsm点击网页中下方处的 Download, 选择 Intel Fortran Compiler Classic and Intel Fortran Compiler(Beta) 下方对应的版本。我选择的是 l_在linux系统的用户目录下安装ifort和mkl库并配置
使用ftl文件生成图片中图片展示无样式,不显示_ftl格式pdf的样式调整-程序员宅基地
文章浏览阅读689次,点赞7次,收藏8次。些项目时需要一个生成图片的方法,我在网上找到比较方便且适合我去设置一些样式的生成方式之一就是使用Freemarker,在对应位置上先写好一个html格式的ftl文件,在对应位置用${参数名}填写上。还记得当时为了解决图片大小设置不上,搜索了好久资料,不记得是在哪看到的需要在里面使用width与height直接设置,而我当时用style去设置,怎么都不对。找不到,自己测试链接,准备将所有含有中文的图片链接复制一份,在服务器上存储一份不带中文的文件。突然发现就算无中文,有的链接也是打不开的。_ftl格式pdf的样式调整
orin Ubuntu 20.04 配置 Realsense-ROS_opt/ros/noetic/lib/nodelet/nodelet: symbol lookup -程序员宅基地
文章浏览阅读1.5k次,点赞6次,收藏12次。拉取librealsense。_opt/ros/noetic/lib/nodelet/nodelet: symbol lookup error: /home/admin07/reals
随便推点
操作系统精选习题——第四章_系统抖动现象的发生由什么引起的-程序员宅基地
文章浏览阅读3.4k次,点赞3次,收藏29次。一.单选题二.填空题三.判断题一.单选题静态链接是在( )进行的。A、编译某段程序时B、装入某段程序时C、紧凑时D、装入程序之前Pentium处理器(32位)最大可寻址的虚拟存储器地址空间为( )。A、由内存的容量而定B、4GC、2GD、1G分页系统中,主存分配的单位是( )。A、字节B、物理块C、作业D、段在段页式存储管理中,当执行一段程序时,至少访问()次内存。A、1B、2C、3D、4在分段管理中,( )。A、以段为单位分配,每._系统抖动现象的发生由什么引起的
UG NX 12零件工程图基础_ug-nx工程图-程序员宅基地
文章浏览阅读2.4k次。在实际的工作生产中,零件的加工制造一般都需要二维工程图来辅助设计。UG NX 的工程图主要是为了满足二维出图需要。在绘制工程图时,需要先确定所绘制图形要表达的内容,然后根据需要并按照视图的选择原则,绘制工程图的主视图、其他视图以及某些特殊视图,最后标注图形的尺寸、技术说明等信息,即可完成工程图的绘制。1.视图选择原则工程图合理的表达方案要综合运用各种表达方法,清晰完整地表达出零件的结构形状,并便于看图。确定工程图表达方案的一般步骤如下:口分析零件结构形状由于零件的结构形状以及加工位置或工作位置的不._ug-nx工程图
智能制造数字化工厂智慧供应链大数据解决方案(PPT)-程序员宅基地
文章浏览阅读920次,点赞29次,收藏18次。原文《智能制造数字化工厂智慧供应链大数据解决方案》PPT格式主要从智能制造数字化工厂智慧供应链大数据解决方案框架图、销量预测+S&OP大数据解决方案、计划统筹大数据解决方案、订单履约大数据解决方案、库存周转大数据解决方案、采购及供应商管理大数据模块、智慧工厂大数据解决方案、设备管理大数据解决方案、质量管理大数据解决方案、仓储物流与网络优化大数据解决方案、供应链决策分析大数据解决方案进行建设。适用于售前项目汇报、项目规划、领导汇报。
网络编程socket accept函数的理解_当在函数 'main' 中调用 'open_socket_accept'时.line: 8. con-程序员宅基地
文章浏览阅读2w次,点赞38次,收藏102次。在服务器端,socket()返回的套接字用于监听(listen)和接受(accept)客户端的连接请求。这个套接字不能用于与客户端之间发送和接收数据。 accept()接受一个客户端的连接请求,并返回一个新的套接字。所谓“新的”就是说这个套接字与socket()返回的用于监听和接受客户端的连接请求的套接字不是同一个套接字。与本次接受的客户端的通信是通过在这个新的套接字上发送和接收数_当在函数 'main' 中调用 'open_socket_accept'时.line: 8. connection request fa
C#对象销毁_c# 销毁对象及其所有引用-程序员宅基地
文章浏览阅读4.3k次。对象销毁对象销毁的标准语法Close和Stop何时销毁对象销毁对象时清除字段对象销毁的标准语法Framework在销毁对象的逻辑方面遵循一套规则,这些规则并不限用于.NET Framework或C#语言;这些规则的目的是定义一套便于使用的协议。这些协议如下:一旦销毁,对象不可恢复。对象不能被再次激活,调用对象的方法或者属性抛出ObjectDisposedException异常重复地调用对象的Disposal方法会导致错误如果一个可销毁对象x 包含或包装或处理另外一个可销毁对象y,那么x的Disp_c# 销毁对象及其所有引用
笔记-中项/高项学习期间的错题笔记1_大型设备可靠性测试可否拆解为几个部分进行测试-程序员宅基地
文章浏览阅读1.1w次。这是记录,在中项、高项过程中的错题笔记;https://www.zenwu.site/post/2b6d.html1. 信息系统的规划工具在制订计划时,可以利用PERT图和甘特图;访谈时,可以应用各种调查表和调查提纲;在确定各部门、各层管理人员的需求,梳理流程时,可以采用会谈和正式会议的方法。为把企业组织结构与企业过程联系起来,说明每个过程与组织的联系,指出过程决策人,可以采用建立过程/组织(Process/Organization,P/O)矩阵的方法。例如,一个简单的P/O矩阵示例,其中._大型设备可靠性测试可否拆解为几个部分进行测试