PX4基本配置_px4 bootloader-程序员宅基地
目录
下载固件
注意
在开始安装固件之前,必须断开与飞控的所有USB连接(直接或通过遥测无线电)。飞控不得由电池供电。
默认下载的是最新发布的PX4稳定版固件
下载原生稳定版固件
下载步骤:
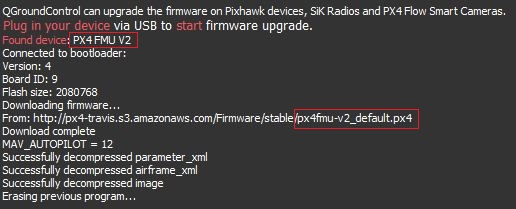
打开下图页面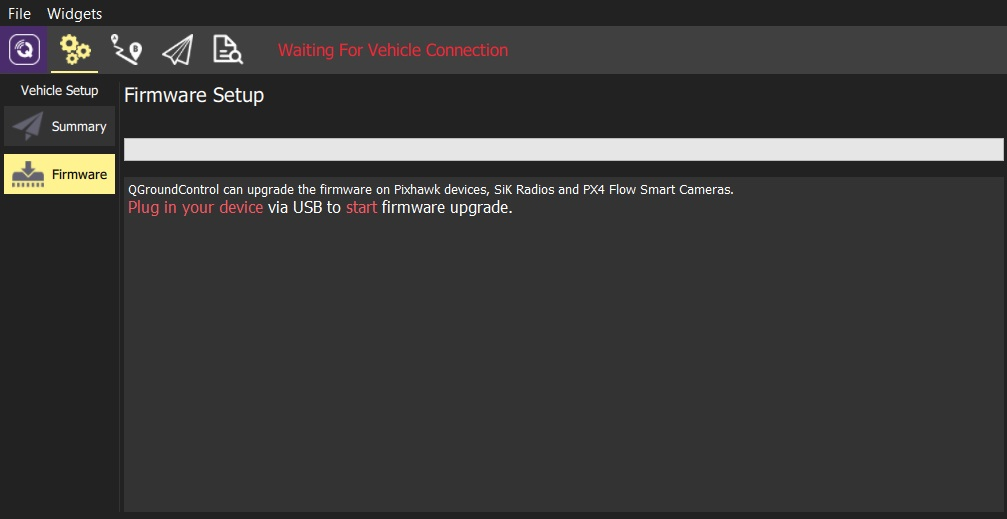
通过USB连接飞控
注意
直接通过USB进行连接,而不是通过USB集线器
-
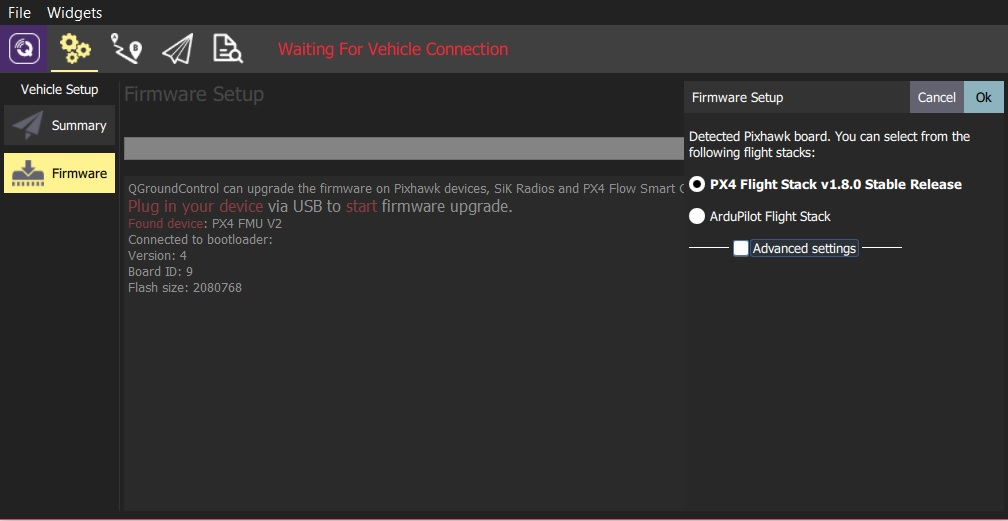
选择需要下载的固件,默认会下载最新稳定版
-
点进OK进行下载
然后,固件将进行一系列升级步骤(下载新固件、擦除旧固件等)。每个步骤都会打印到屏幕上,整个进度显示在进度条上。
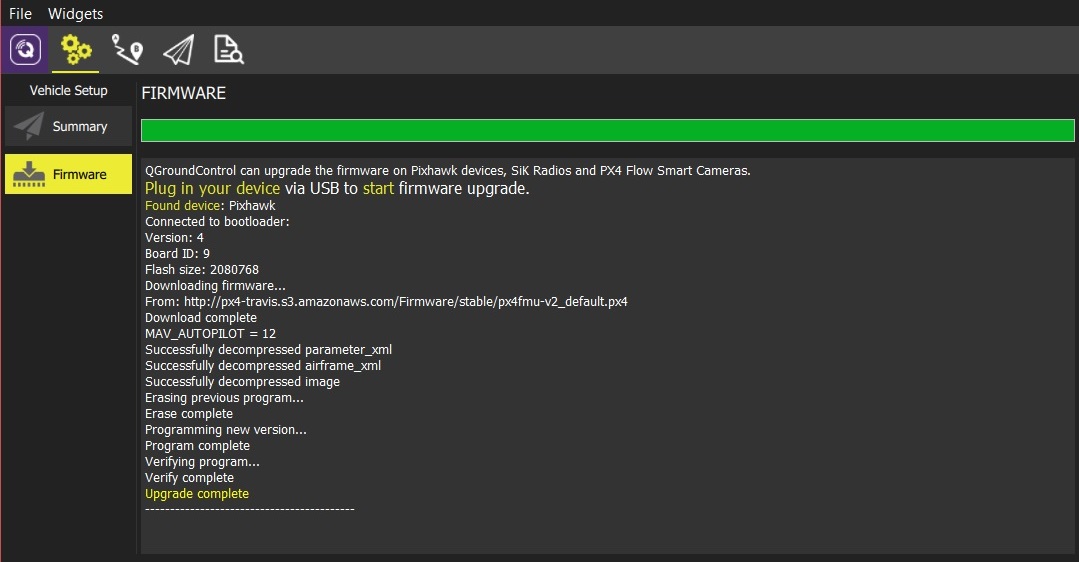
固件加载完成后,飞控将重新启动并重新连接。
提示
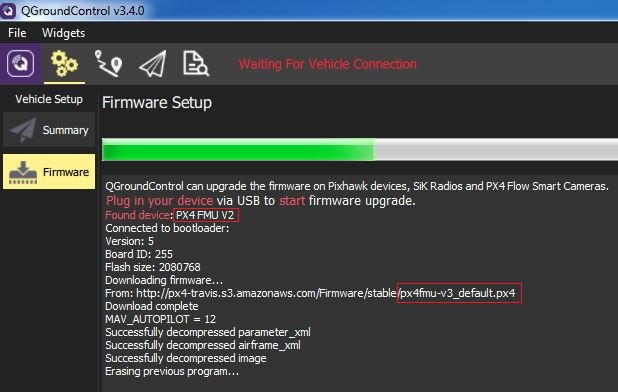
如果QGroundControl安装了FMUv2目标(请参阅安装过程中的控制台),但是您有一个更新的飞控板,您可能需要更新bootloader程序才能访问飞行控制器上的所有内存。
接下来,您需要设置机身(然后是传感器、无线电等)
安装PX4 Master, Beta或自定义固件
- 下载固件时打开下图页面
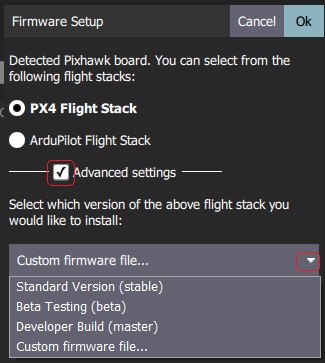
- 点击 Advanced settings 选择下拉显示框
- Standard Version (stable): 默认版本(即无需使用Advanced settings 来安装!)
- Beta Testing (beta): 测试版/候选版本。只有当新版本准备完毕时才可用。
- Developer Build (master): PX4的最新版本。
- Custom Firmware file...: 自定义固件文件(例如,您在本地构建的)。如果选择自定义固件文件,您需要在下一步中从文件系统中选择自定义固件。
Firmware update then continues as before.
FMUv2 Bootloader 更新
如果QGroundControl安装了FMUv2固件,并且您有一个更新的飞控板(内存2M),您可能需要更新引导加载程序才能访问飞行控制器上的所有内存。
注解
早期的FMUv2 Pixhawk系列飞行控制器存在硬件问题,限制其使用1MB闪存。该问题已在较新的板上修复,但您可能需要更新工厂提供的引导程序,以便安装FMUv3固件并访问所有2MB可用内存。
更新bootloader步骤:
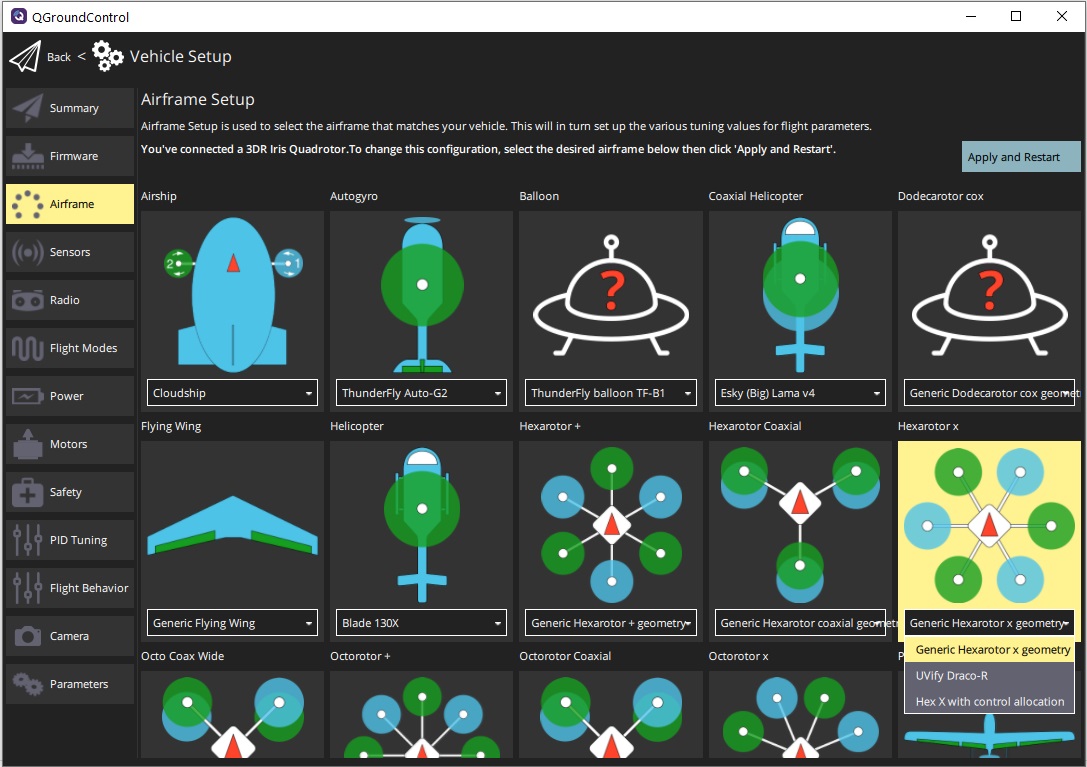
先选择你的机架符合的大致分类,然后在下拉菜单中选择最匹配的机架类型
-
插入 SD 卡(启用引导日志记录,便于调试任何可能的问题。)
-
升级到PX4主分支版本(更新固件时,请选中高级设置,然后从下拉列表中选择Developer Build (master))。QGroundControl将自动检测硬件是否支持FMUv2,并安装相应的固件。
等待飞控重启。
-
找到并启用 参数 SYS_BL_UPDATE。
-
重新启动(断开/重新连接飞控板)。 Bootloader更新只需要几秒钟即可完成。
-
然后再重新 更新固件 。 这一次,QGroundControl应将硬件自动检测为FMUv3,并更新固件。
机架设置
安装固件后,您需要选择最适合您载具的 机架配置。
注解
根据机架品牌和型号选择机架配置(如果有),否则,选择“通用”机架选项。连接飞控和地面站,点击 "Q" 图标 > Vehicle Setup > Airframe
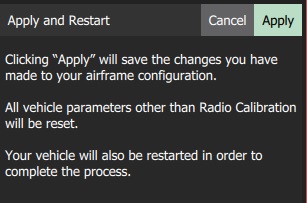
单击应用并重新启动。在以下提示中单击应用以保存设置并重新启动车辆。
飞行控制器/传感器方向
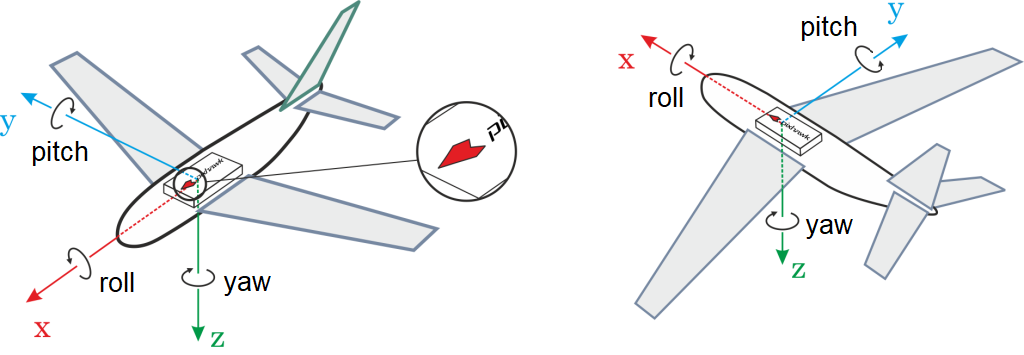
默认的飞行器(如果具有外部罗盘)应该向上安装在机架上部,箭头朝向飞行器的前方。 如果板载或外部罗盘被安装在其他方向,需要在固件中配置。
计算朝向
飞行控制器的滚转、俯仰和/或偏航偏移是相对于车辆绕前(x)、右(y)、下(z)轴计算的。
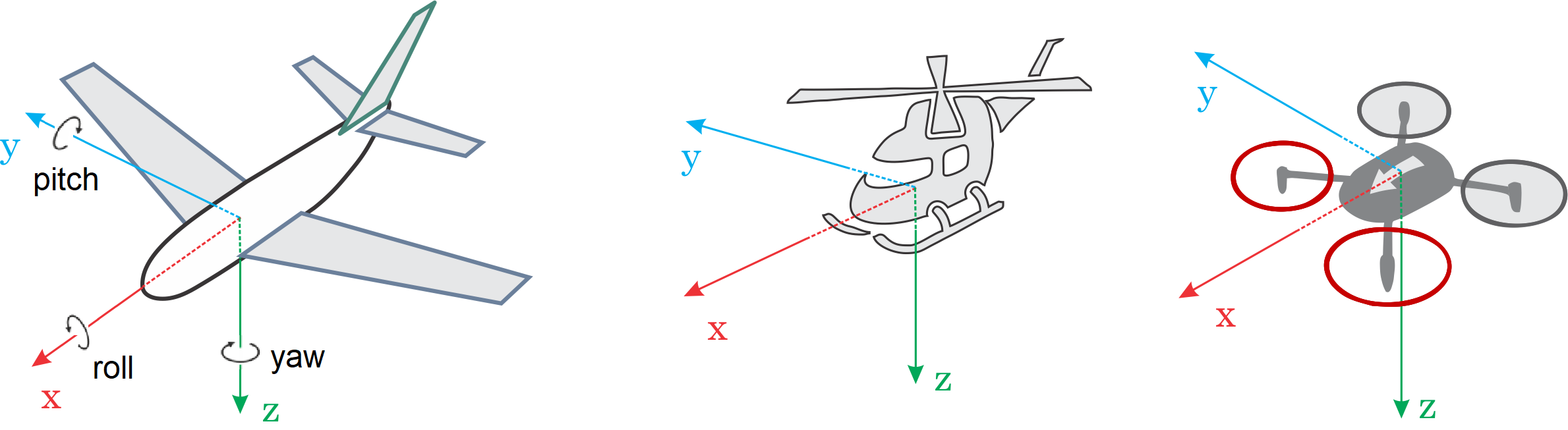
朝前(x)、右(y)、下(z)看时,顺时针旋转为正,逆时针旋转为负
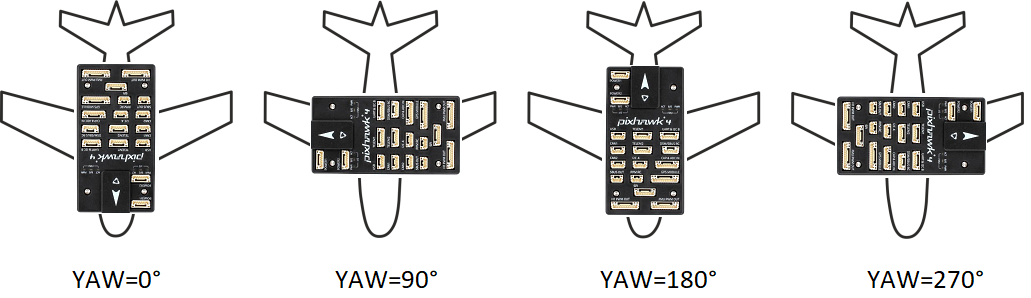
例如,下面所示的车辆具有围绕z轴的旋转(即仅偏航),对应于:ROTATION_NONE,ROTATION_YAW_90,ROTATION_YAW_180,ROTATION_YAW_270.
注解
对于垂直起降尾座飞机机身,根据其多旋翼配置(即在起飞、悬停、着陆过程中相对于飞行器)为所有传感器校准设置飞行器方向。
在稳定向前飞行期间,轴通常相对于飞行器的方向。
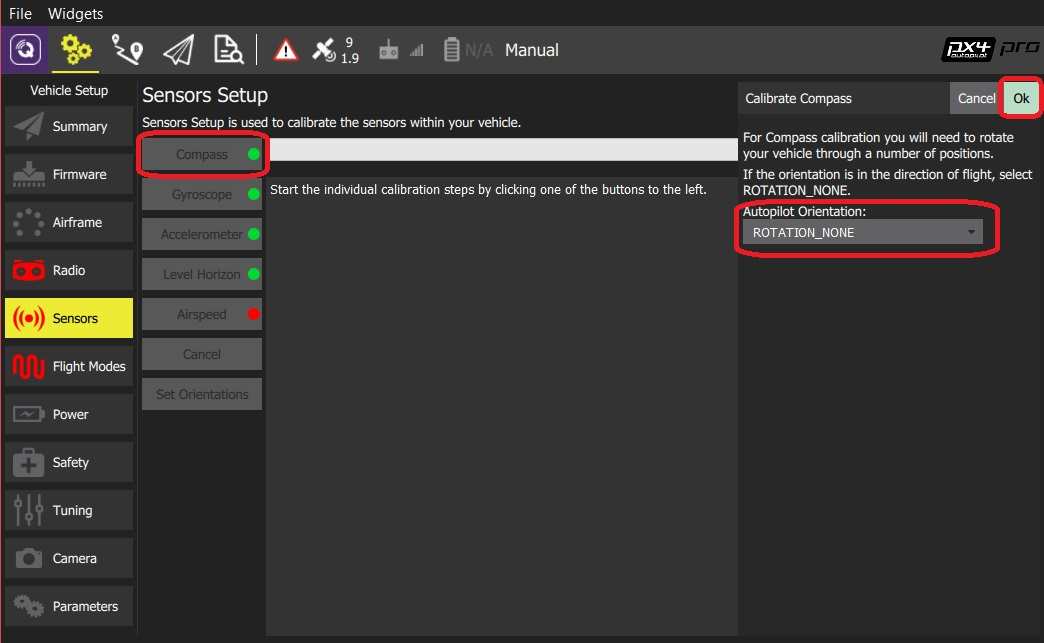
设置朝向
打开地面站,连接飞机
选择Vehicle Setup->Sensors
选择 Set Orientations 按钮.
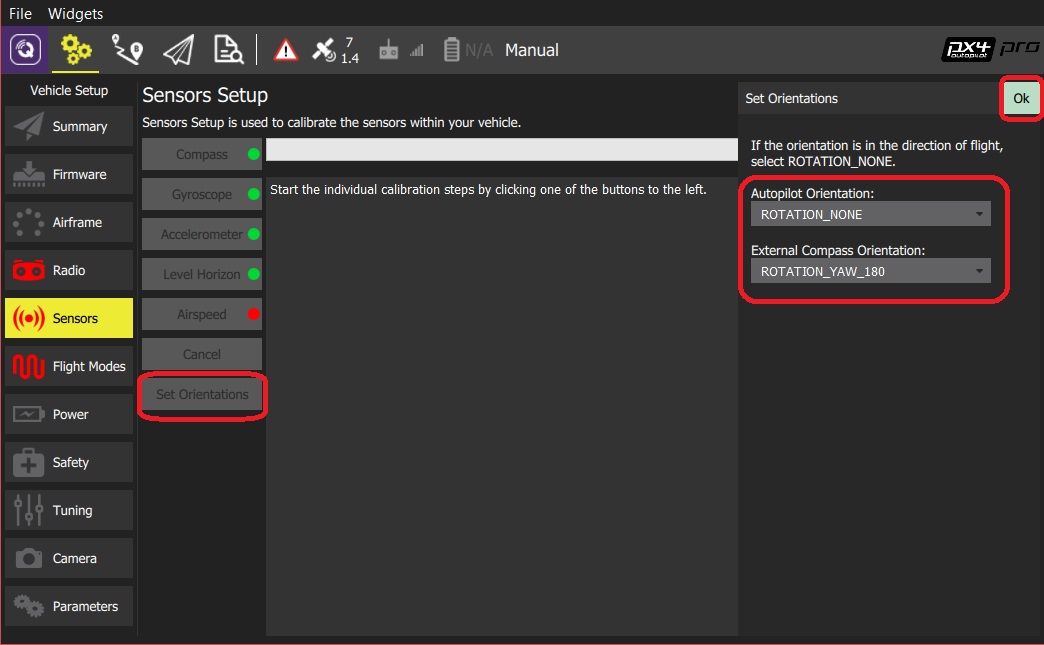
选择自动驾驶仪方向(如上计算)。
-

-
以相同的方式选择外部指南针方向(仅当您的机架具有外部罗盘时才会显示此选项)。
-
点击 OK.
罗盘校准
罗盘校准过程配置了所有连接的外部和内部罗盘,QGroundControl将引导您在多个设定方向上围绕指定轴旋转车辆。
首次使用罗盘时,您需要校准罗盘,如果车辆暴露在非常强的磁场中,或者在具有异常磁特性的区域使用,您可能需要重新校准。
罗盘校准有两种类型:
首次在机身上安装自动驾驶仪后或车辆配置发生重大变化时,需要进行此校准。
注解
如果您使用的是外部磁强计/罗盘(或集成到GPS模块中的罗盘),请确保它安装在尽可能远离其他电子设备的位置,并处于受支持的方向。有关连接GPS+指南针的说明,请参见特定自动驾驶仪硬件的基本装配。一旦连接,QGroundControl将自动检测外部磁力计。
提示
罗盘校准不良的迹象包括盘旋时的多旋翼半径变大,或试图直飞时偏离航路。
执行校准
校准步骤如下:
选择远离大型金属物体或磁场的位置。金属并不总是显而易见的!避免在办公桌(通常包含金属棒)顶部或车辆旁边进行校准。如果你站在钢筋分布不均匀的混凝土板上,校准甚至会受到影响。
启动QGroundControl并连接载具。
选择顶部工具栏中的齿轮图标(车辆设置),然后选择侧栏中的传感器。
单击罗盘传感器按钮。
点击 OK开始校准
把你的飞机放置在下面显示的某一个方向,并保持静止。 随后提示(方向图像变为黄色)在水平方向旋转飞行器。 该位置标定完成后,屏幕上的相应图示将变成绿色。
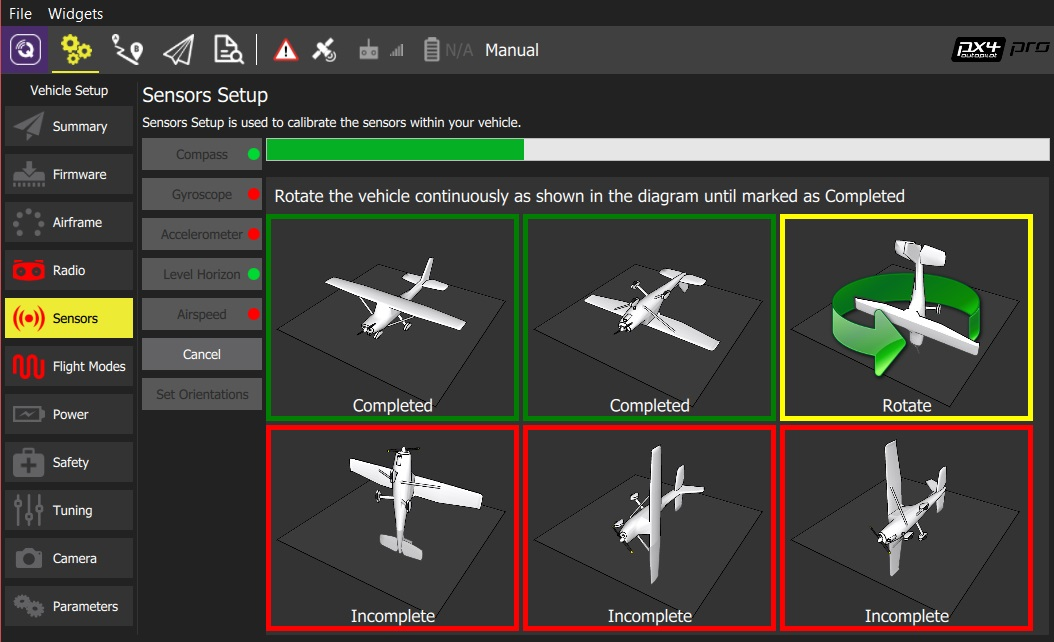
在机体的所有方向上重复校准步骤。
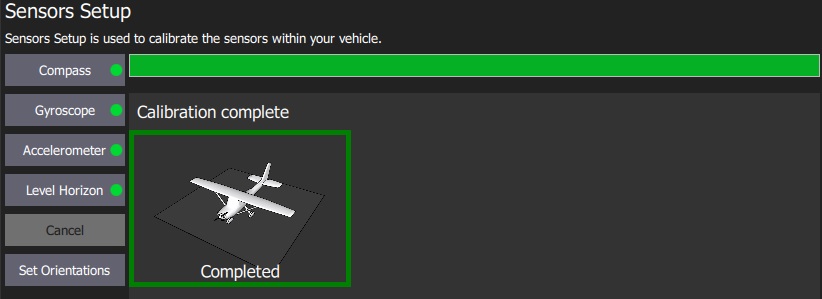
在所有方向校准完毕后,QGroundControl将显示Calibration complete(校准完成)(所有方向图像将显示为绿色,进度条将完全填满)。然后可以继续下一个传感器。
陀螺仪校准
将车辆放置在平坦的地面上并保持静止。
# 执行校准
标定步骤如下:
-
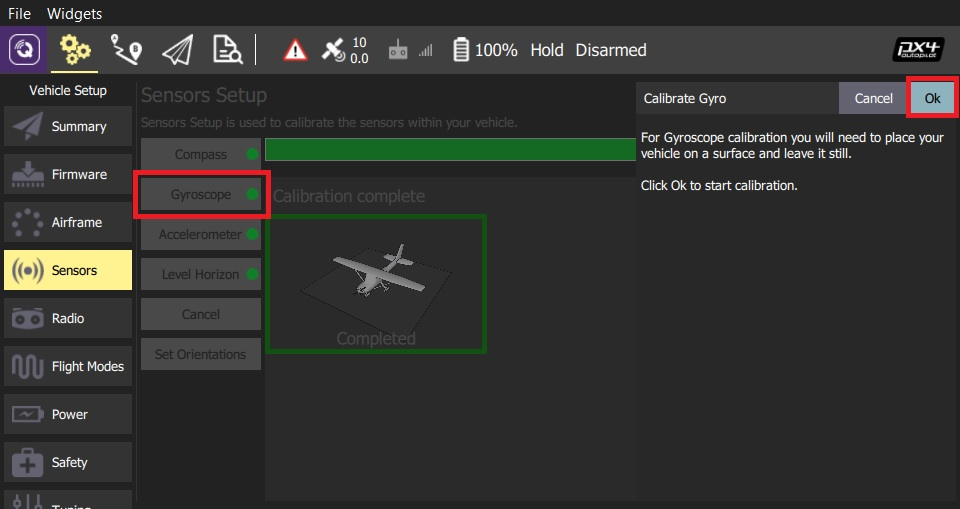
点击Gyroscope 按钮
-
将车辆放置在平坦的地面上并保持静止。
-
点击 Ok 以开始校准
顶部的进度条显示进度:
-
完成后,QGroundControl将显示进度条校准完成
注解
如果移动车辆,QGroundControl将自动重新启动陀螺仪校准。
加速度计
首次使用或飞行控制器方向改变时,您需要校准加速计。否则,您不需要重新校准(除非在冬季,如果您的飞行控制器没有在工厂进行热校准)。
注解
加速计校准不良通常导致飞行前检查报错“高加速计偏差”。
QGroundControl将引导您在多个方向放置和保持车辆(当您在不同位置之间移动时,系统将提示您)。这与指南针校准类似,只是在每个方向上保持车辆静止(而不是旋转)。
注解
校准使用最小二乘“拟合”算法,不需要你有“完美”的90度方位。如果每个轴在校准序列中的某个时间基本上都指向上下,并且车辆保持静止,那么精确的方向并不重要。
执行校准
校准步骤如下:
启动QGroundControl并连接车辆。
选择顶部工具栏中的齿轮图标(车辆设置),然后选择侧栏中的传感器。
单击加速计传感器按钮。
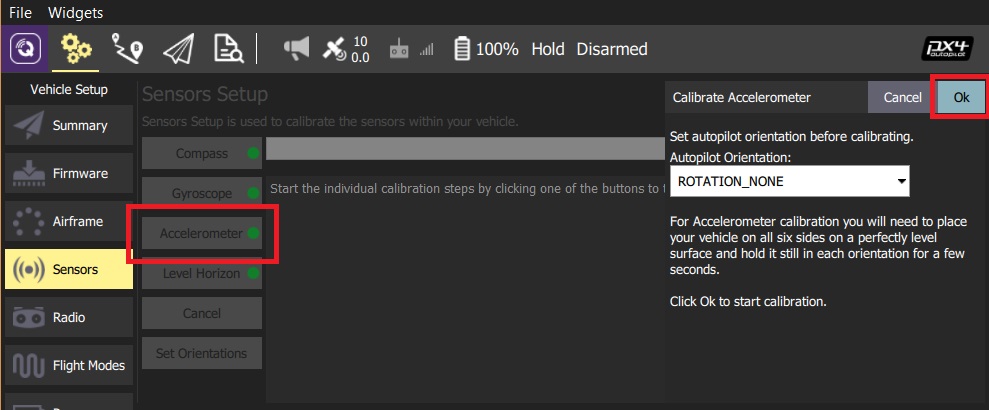
注解
您应该已经设置了自动驾驶仪方向。如果没有,也可以在此处设置。
单击“确定”开始校准。
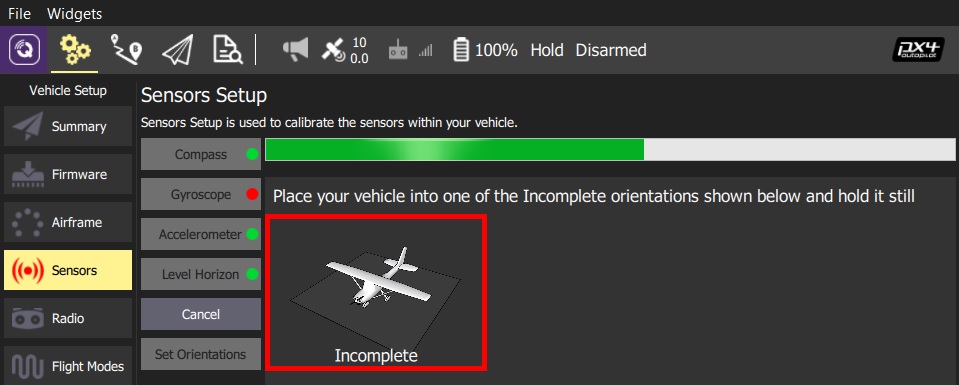
根据屏幕上的图像放置车辆。看到 (图示位置变成黄色) 的提示,握紧机体并保持静止。 该位置标定完成后,屏幕上的相应图示将变成绿色。
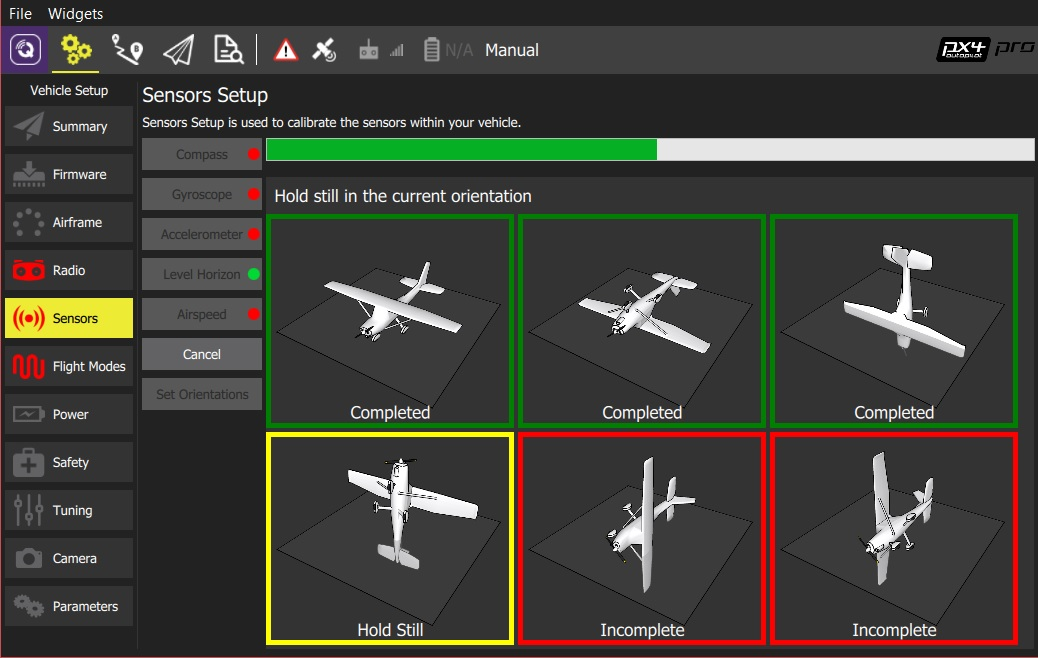
在机体的所有方向上重复校准步骤。在所有位置校准车辆后,QGroundControl将显示Calibration complete(校准完成)(所有方向图像将显示为绿色,进度条将完全填满)。
空速计校准
空速校准需要读取空速为0的稳定基线,以确定偏移。
注解
强烈建议固定翼和垂直起降车辆使用空速传感器。
注意
与大多数其他传感器驱动器不同,空速传感器驱动器不是自动启动的。校准前,必须通过相应参数启用它们:
- Sensirion SDP3X (SENS_EN_SDP3X)
- TE MS4525 (SENS_EN_MS4525DO)
- TE MS5525 (SENS_EN_MS5525DS)
- Eagle Tree airspeed sensor (SENS_EN_ETSASPD)
执行校准
空速校准需要读取空速为0的稳定基线,以确定偏移。将双手放在皮托管上,以阻挡任何风,但不要堵住孔(如果在室内校准传感器,则不需要这样做),然后用嘴向管内吹气。
启动QGroundControl并连接车辆。
选择顶部工具栏中的齿轮图标(车辆设置),然后选择侧栏中的传感器。
单击空速传感器按钮。
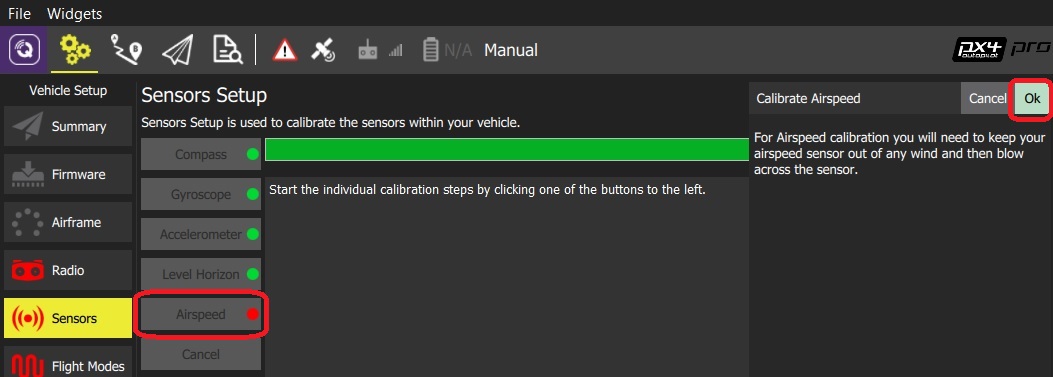
保护传感器免受风吹(即用手将其罩住)。注意不要堵塞它的任何孔。
单击“确定”开始校准。
一旦提示吹气(进度条会停住一下),向皮托管尖端吹气,进度条满表示校准结束。
水平平面校准
您可以使用水平地平线校准来补偿控制器方向上的小偏差对准。
提示
强烈建议调平地平线,这样可以获得最佳的飞行性能。如果您在飞行中注意到持续漂移,也可以重复此过程。
执行校准
启动QGroundControl并连接车辆。
选择顶部工具栏中的齿轮图标(车辆设置),然后选择侧栏中的传感器。
单击“Level Horizon”按钮。
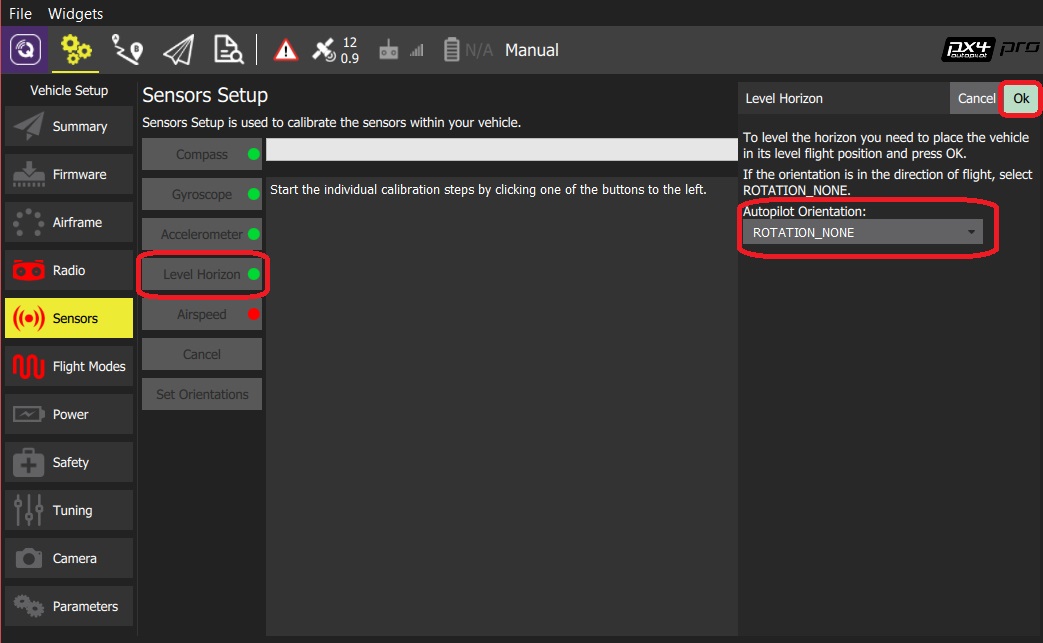
注意:您应该已经设置了自动驾驶仪方向。如果没有,也可以在这里设置。
将飞行器放置于水平方向:
这是飞行器在水平飞行时的位置(飞行器通常会向上轻微翘起!)
对于旋翼机,这是悬停位置。
- 点击 OK 来开始校准
- 等待校准过程结束。
验证
设置方位并完成水平地平线校准后,在飞行视图中检查当您将车辆指向北方时,指南针中的航向是否显示为0左右,并且地平线是否水平(顶部为蓝色,底部为绿色)。
智能推荐
开源项目,毕业设计_本科毕业设计拿别人的开源代码修改-程序员宅基地
文章浏览阅读1.5w次,点赞35次,收藏385次。自己在网上找的开源项目,比较好分享给大家热门开源项目(包含小四轴、智能手环、光立方、智能车、防丢器等项目)号外!号外!(搞四轴,有这套就足够了!)科研级别的小四轴STM32F4芯片支持WIFI且android手机控制自适应控制就是牛掰!该飞机面向有科研和强烈学习意向的小伙伴们使用,如果只是想玩的话你肯定不会喜欢这套四轴的,主要设计思想是提供一个高性能的控制和姿态算法验证平台,因此..._本科毕业设计拿别人的开源代码修改
Java快速开发框架_若依——Ruoyi添加自己的业务模块_ruoyi java17-程序员宅基地
文章浏览阅读1w次,点赞2次,收藏26次。QQ 1274510382Wechat JNZ_aming商业联盟 QQ群538250800技术搞事 QQ群599020441解决方案 QQ群152889761加入我们 QQ群649347320共享学习 QQ群674240731纪年科技aming网络安全 ,深度学习,嵌入式,机器强化,生物智能,生命科学。叮叮叮:产品已上线 —>关注 官方-微信公众号——济南纪年信息科技有限公司民生项目:商城加盟/娱乐交友/创业商圈/外包兼职开发-项目发布/安全项目:态势感.._ruoyi java17
CISCO 交换机配置 Web浏览器的方式-程序员宅基地
文章浏览阅读9k次,点赞2次,收藏3次。 当利用Console口为交换机设置好IP地址信息并启用HTTP服务后,即可通过支持JAVA的Web浏览器访问交换机,并可通过Web通过浏览器修 改交换机的各种参数并对交换机进行管理。事实上,通过Web界面,可以对交换机的许多重要参数进行修改和设置,并可实时查看交换机的运行状态。不过在利用 Web浏览器访问交换机之前,应当确认已经做好以下准备工作:·在用于管理的计算机中安装T..._思科交换机2960s有web配置吗
ERROR - file: tracker_proto.c, line: 48, server: 127.0.0.1:22122, response status 2 != 0-程序员宅基地
文章浏览阅读2.5w次,点赞2次,收藏6次。报错信息: [2018-09-09 20:33:12] ERROR - file: tracker_proto.c, line: 48, server: 127.0.0.1:22122, response status 2 != 0 [2018-09-09 20:33:12] ERROR - file: tracker_proto.c, line: 48, server: 127.0.0.1:..._error - file: tracker_proto.c, line: 48, server: 172.17.0.1:22122, response
使用matplotlib显示图片(《深度学习入门:基于Python的理论与实现》实践笔记)_matplotlib展示图片-程序员宅基地
文章浏览阅读3.9k次。使用matplotlib显示图片(《深度学习入门:基于Python的理论与实现》实践笔记)一、安装matplotlib库二、导入matplotlib.pyplot库和matplotlib.image库里的imread函数三、实例:显示图片一、安装matplotlib库在命令行使用下面的命令即可:pip install matplotlib二、导入matplotlib.pyplot库和matplotlib.image库里的imread函数在程序开头使用:import matplotlib.pyp_matplotlib展示图片
Subversion实践案例——客户现场模式的分布式开发_开发去客户现场的案例-程序员宅基地
文章浏览阅读1.2k次。基本信息 用户单位:某应用软件研发企业 用户规模:100人以上 组织过程水平:中等 CMMI评审等级:无 Subversion使用时间:1年 客户需求 由于公司每次向新客户提交软件的时候都需要派出一个小规模的团队到客户现场进行一段时间的软件定制和维护。此外,老客户系统的重大升级和功能扩展也需要一个小团队在客户现场进行一段时间的开发。因此,异地开发的配置管理就是一_开发去客户现场的案例
随便推点
(基于matlab自写代码)语音信号的短时分析,计算平均能量,短时过零数_matlab求语音信号短时过零率的函数-程序员宅基地
文章浏览阅读3.2k次。一定时宽的语音信号,其能量的大小随时间有明显的变化。清音段能量比浊音段小得多。短时过零数也可用于语音信号分析中,发浊音时,其语音能量约集中于3kHz以下,而发清音时,多数能量出现在较高频率上。可认为浊音时具有较低的平均过零数,而清音时具有较高的平均过零数,故对一短时语音段计算其短时平均能量及短时平均过零数,就可以区分其中的清音段和浊音段,从而可判别句中清、浊音转变时刻,声母韵母的分界以及无声与有声的分界。这在语音识别中有重要意义。自己编写的matlab代码,对一段语音,取帧长为240个点,计算其平均能_matlab求语音信号短时过零率的函数
Ubuntu服务器创建新用户及解决新用户登录Access denied问题
默认情况下,在Ubuntu上,sudo组的成员被授予sudo访问权限。如果您希望新创建的用户具有管理权限,需要将将用户添加到sudo组。命令将向你询问一系列的问题。密码是必需的,其他字段都是可选的。最后,输入Y确认信息是否正确。执行完上述步骤后需要重启ssh服务,否则新创建的用户连接服务器时会出现。
项目组织战略管理及组织结构_项目组织的具体形态的是战略管理层-程序员宅基地
文章浏览阅读1.7k次。组织战略是组织实施各级项目管理,包括项目组合管理、项目集管理和项目管理的基础。只有从组织战略的高度来思考,思考各个层次项目管理在组织中的位置,才能够理解各级项目管理在组织战略实施中的作用。同时战略管理也为项目管理提供了具体的目标和依据,各级项目管理都需要与组织的战略保持一致。..._项目组织的具体形态的是战略管理层
图像质量评价及色彩处理_图像颜色质量评价-程序员宅基地
文章浏览阅读1k次。目录基本统计量色彩空间变换亮度变换函数白平衡图像过曝的评价指标多视影像因曝光条件不一而导致色彩差异,人眼可以快速区分影像质量,如何利用图像信息辅助算法判断影像优劣。基本统计量灰度均值方差梯度均值方差梯度幅值直方图图像熵p·log(p)色彩空间变换RGB转单通道灰度图像 mean = 225.7 stddev = 47.5mean = 158.5 stddev = 33.2转灰度梯度域gradMean = -0.0008297 / -0.000157461gr_图像颜色质量评价
MATLAB运用规则,利用辛普森规则进行数值积分-程序员宅基地
文章浏览阅读1.4k次。Simpson's rule for numerical integrationZ = SIMPS(Y) computes an approximation of the integral of Y via the Simpson's method (with unit spacing). To compute the integral for spacing different from one..._matlab利用幸普生计算积分
【AI之路】使用huggingface_hub优雅解决huggingface大模型下载问题-程序员宅基地
文章浏览阅读1.2w次,点赞28次,收藏61次。Hugging face 资源很不错,可是国内下载速度很慢,动则GB的大模型,下载很容易超时,经常下载不成功。很是影响玩AI的信心。经过多次测试,终于搞定了下载,即使超时也可以继续下载。真正实现下载无忧!究竟如何实现?且看本文分解。_huggingface_hub